In the future, it is anticipated that robots may have to traverse some pretty inhospitable terrain, either to clear a war-torn region of landmines or scope out a location on Mars for a potential landing site. Many robots designed for remote work are either wheeled or have tracked systems. Whilst this is obviously an advantage for stability, problems arise when the robot encounters any sort of challenging terrain such as steep, potentially unstable rocks. Legged robots would have an obvious advantage over this sort of landscape but the problem at the moment is that these robots simply don’t have the capacity to move across difficult terrain.
Currently, most legged robots carry out their exercise in a science lab, with a flat and uniform floor to ‘walk’ on. Many of them find this enough of a challenge. Moving robots from the lab and into the real world requires that they possess both balance and stability. Simon Kalouche, of Carnegie Mellon University in Pennsylvania set out to find a solution to this problem and his inspiration for the design of a new age of robotic leg came from a very natural source. He was inspired by the incredible ability of mountain goats to scale seemingly vertical cliff faces, jump incredible heights and traverse rocky terrain with ease.
The goal was to invent a robot leg capable of providing both stability and agility over a wide range of surfaces, and the result is the very appropriately named GOAT leg. This stands for Gearless Omni-directional Acceleration-vectoring Topology. Whilst very obviously different from the anatomy of a goat’s leg itself, it looks as though this robotic leg will at least be able to mimic some of that natural agility.
At the moment, it’s estimated that 50% of the world landmass is not accessible to wheeled or tracked machines, and it is these that the GOAT robot leg is earmarked to tackle. They include:
- Highly unstructured terrains, that are often impassable to wheeled vehicles and currently existing legged robots.
- Obstacles of large and steep variations in ground elevation (relative to the robots height) creating discontinuous paths for walking (i.e. there’s a limit to the slope of a terrain that can be walked over which is around 45 degrees for humans).
- Pits, holes, ditches and local cavities which also create discontinuities in a walking path.
- Tight and compact spaces where turning or reorienting to then walk or jump is not possible or ideal.
- Long distance missions over diverse terrains where different gaits or modes of locomotion can improve both mobility, efficiency, and longevity.
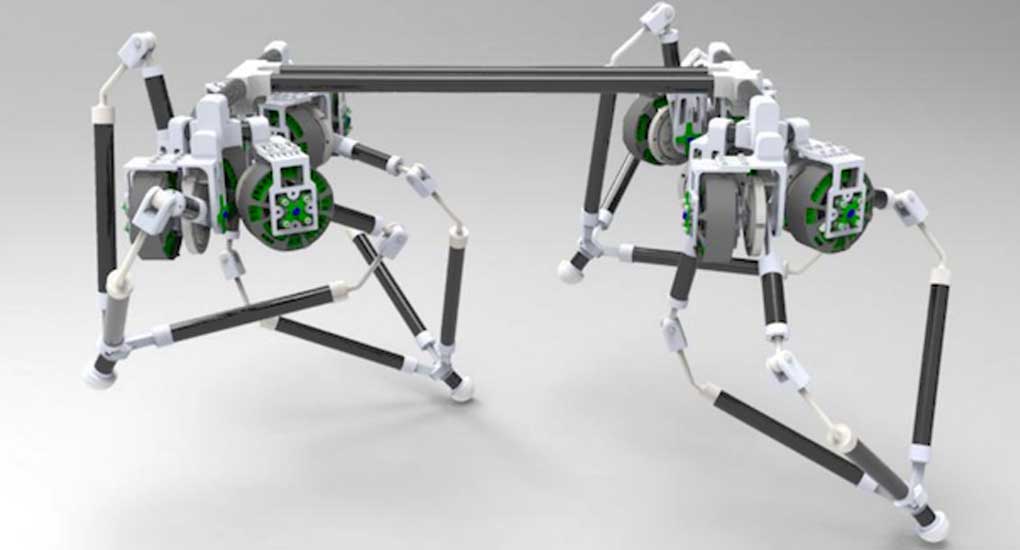
The GOAT leg is tripodal, so composed of three separate sections, all joining together at the bottom to form the foot, or more appropriately perhaps, the hoof. The key to the success of this design is that the three sections means that the leg can shift in all directions, rather than just moving forward or backward. This makes it much easier for the GOAT leg to both change direction rapidly, and negotiate tricky terrain.
Much like its namesake, the GOAT leg is capable of some explosive jumps, with the real world application being that a robot equipped with these legs will be able to traverse some pretty difficult terrain, with relative ease. This is in part due to controlling the motors of the leg in such a way that it mirrors the behaviour of a mechanical spring. The huge advantage of this is that the stiffness of the virtual spring can be altered, which would be difficult if not impossible using an actual spring. The speed at which force can be exerted by the leg itself is also highly adaptable, with the result being that GOAT can jump over 32 inches high, which is more than twice its height. Importantly though, the leg also needs to be capable of absorbing the energy created by the landing impact of a particularly high jump. Watching the GOAT leg do this is particularly impressive and you can certainly see how this design will be able to allow for a balanced and smooth negotiation of challenging landscapes.
This design is not meant to be the fastest leg, by any means. But the stability and flexibility offered mean that it has a far wider potential application than faster but less stable robots, which generally also almost always require a flat surface on which to reach these top speeds.
For now, the GOAT is still is the early stages of development, with the next stage being to try and integrate the external components into the leg itself. The ultimate aim is for the GOAT leg to become integrated into a wide range of robotics, from monopods to quadrupedal designs, thus opening up a whole new territory for these mechanical marvels to follow in the hoof prints of their namesake.
Top image: Simon Kalouche/CMU
References
http://www.ri.cmu.edu/pub_files/2016/8/kaloucheThesis.pdf
https://techcrunch.com/2016/08/17/goat-legs-will-let-future-robots-handle-rough-terrain-with-ease/



No comment