
The field of robotics has exploded since the term robot was introduced in 1920. Where robots do exceptionally well is in manufacturing. We use robots to automate redundant tasks, perform jobs that are too dangerous for humans, and even build computers or other robots. We are now at a time that we want robots in our homes, but unlike a well-ordered factory line, homes are cluttered and unpredictable. Robots in our homes would require some form of sensory input to succeed.
Scientists from Peking University in Beijing have developed a smart skin to wrap on prosthetic limbs that would give robots a humanlike sense of touch. There are many different parameters smart skin can measure including temperature, pressure and humidity. Some researchers have tried to mimic the tactile response using materials like silicone or polyurethanes but had difficulties replicating the sensitivity found in human fingers.
The skins that are currently available are neither energy efficient nor do they have the critical resolution for advanced perception. A Peking team, headed by Haixia Zhang, developed a self-powered smart skin analog for mobile or prosthetic devices that has impressive sensitivity.
Production of Smart Skin
The skin begins with silver nanowire (Ag NW) electrodes placed on a thin, plastic (PET) film. Layered on top of the Ag NW is a dimpled sheet of poly(dimethylsiloxane). The dimpling on the sheet is necessary to enhance the triboelectric effect, a type of contact electrification when specific materials come in contact with frictional force. This allows the skin to operate without an external power source. Due to the materials used, the skin is transparent, very flexible and light.
Abstract Illustration. Photo: American Chemical Society
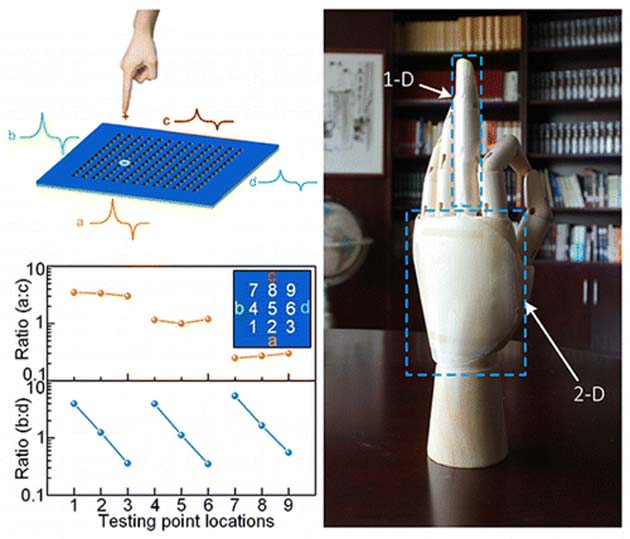
In the prototype presented, the Ag NW electrodes are placed along the sides of a square sheet of skin. The orientation of the four electrodes on opposing faces allowed the researcher to determine the position of a contact point. The skin was fixed in its position and a triboelectric charge touched the skin and moved along the surface. By measuring the voltage distributions from each electrode the position of the contact point can be determined. As a negative triboelectric charge approaches an electrode the voltage will drop.
Skin Covered Prosthetic Hand
The prototype discussed above used four electrodes positioned orthogonally, which was used to make 2D maps of contact points. The skin can also be produced with two electrodes, making a simple touch detector. Zhang’s team took a prosthetic robotic hand and fixed the four-electrode skin to the back of the hand. They then put a two-electrode skin on one of its fingers.
The sensitivity of the smart skin was seen when a 0.16 g bee landed on the hand and was detected by the skin. Previous synthetic skins often required either a large force or displacement before detection was registered. When the hand was probe at a specific position, the calculated position was accurate to within 0.3 mm. The smart skin was even able to detect charged objects hovering 5 cm above its surface. With the bee, both its approach and lift-off were detected by the smart skin, giving positive and negative voltages.
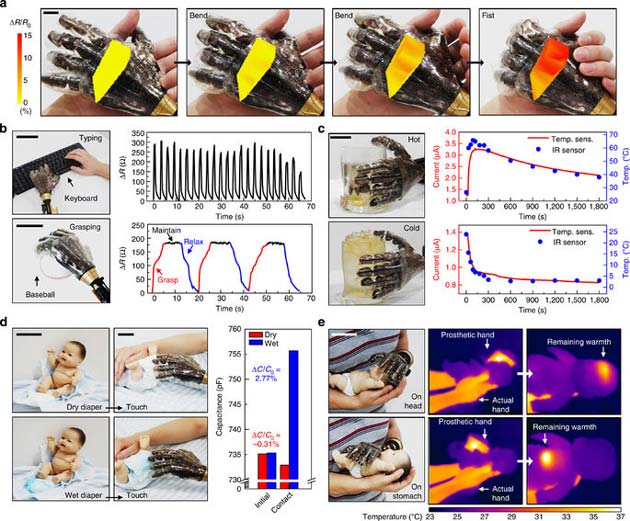
(a) Sequential images of prosthetic hand performing handshake. Scale bar, 2 cm. Spatio-temporal maps of resistance change of SiNR strain gauge arrays are overlapped at the corresponding locations on the back of hand. (b) An image of the prosthetic limb tapping keyboard (top left) and a plot for the corresponding temporal resistance change of the SiNR pressure sensor (top right). Scale bar, 10 cm. An image of the prosthetic limb catching a baseball (bottom left) and a plot for the corresponding temporal resistance change of the SiNR pressure sensor, showing dynamics of the prosthetic hand in grasping, maintaining and relaxing motions (bottom right). Scale bar, 5 cm. (c) Images of the prosthetic limb touching a cup of hot (top left) and iced water (bottom left), and plots for the corresponding temporal current change of the SiNR temperature sensor (PIN diode, red) and actual temperature trace measured by IR sensor (blue; top right: hot water, bottom right: iced water). Scale bar, 3 cm. (d) Images of baby doll with the dry (top left) and wet diaper (bottom left), and the prosthetic hand touching the dry (top middle) and wet diaper (bottom middle). Scale bar, 10 cm (top left). Scale bar, 5 cm (top middle). A bar plot of the capacitance value of the humidity sensor (right) before/after touching the dry (red)/wet (blue) diaper. (e) Images of the prosthetic limb caring a baby doll touching head (top left) and stomach (bottom left), IR camera images of heated prosthetic hand to the body temperature by the heater in the artificial skin (top middle, bottom middle). The heat remained high after detaching the prosthetic hand (top right, bottom right). Scale bar, 5 cm. Sens., sensor; temp., temperature. (Nature)
The Peking team demonstrates impressive sensitivity with their smart skin. Coupled with energy efficiency and their smart skin analog becomes a very practical next step in equipping robots with another sensory mode. The skin has potential uses for humans as well. Prosthetic limbs coated in this skin could give a sense of touch back to amputees or remote controlled robotic arms could give tactile feedback to the user in tasks like robotic surgery.
Top image: Human and robot pointing. (Public Domain)




No comment